
By Jacob Bakovsky, Application Engineer
Late last year, in my spare time, I began developing an automated feeding device geared to help pet owners (me included) save time and eliminate the hassle of twice-daily feedings.
For the manual method of food delivery to my cats, I have to measure out 1/3 cup of kitty kibbles with a measuring scoop and then deliver the food into each respective dish.
I have two cats, so I have to do this for each bowl, twice a day.

It would be easier to just turn a handle, and in a matter of seconds, deliver the proper amount of food to each kitty at the same time – at least, that’s what I hoped.
The design I tried last year to automate the process used an Archimedes screw to bring the kibbles up a tube that then tumble down two arms on each side, making two kitties (and one owner) concurrently happy.
However, it did not work.
Original design – what happened?
Figure 1 shows the original cat feeder design. After 3D printing using the Fortus 450mc FDM printer and testing it I discovered several apparent flaws.

The first major flaw is there is no easy way to refill the chamber.
Typically, an Archimedes screw does not need an auxiliary chamber above, since it uses mechanical force to move a liquid up a chamber to oppose gravity. It is essentially a pump used to transfer water from a low-lying region to a higher region.
I tried to apply the same logic to cat kibbles but ran into many problems. Once the Archimedes screw is removed it is much harder to replace it with a medium such as a cat food because of the solid pebbles. It is easier to displace liquid at the bottom to make room for the screw. I incorrectly assumed it would be easy to displace cat kibbles since they are small in size.
The other major flaw is the dual output tended to push the kibbles mostly out only one side of the two arms, sprinkling in a wide pattern that tended to miss the bowls below.
New components
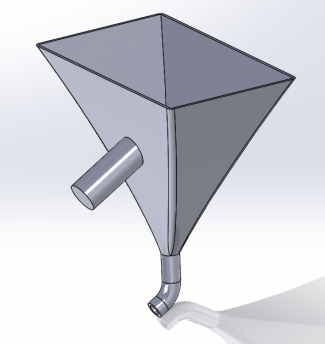
A gravity funnel (Figure 2) was created with an insert to an old hole in the back for location. Once the smaller end was lined up with the back of the existing housing, I marked a pilot hole and drilled a ¾ inch hole to fit the bottom end into the housing. The smaller hole would regulate the amount of food flowing into the Archimedes chamber at any given time.
Base modifications
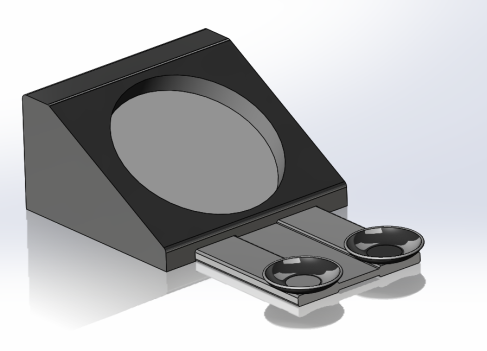
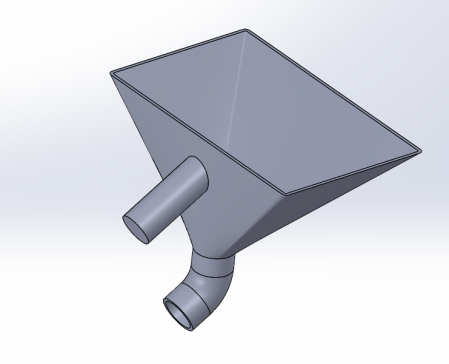
Figure 3 shows the previous design for the angle base. The two circular plates were originally designed as place holders for my existing cat bowls. Figure 4 shows the new design; the food diverter goes through a single tube, removing the issue of food exiting only one tube and missing the bowls.

Mass flow considerations
Mass flow considerations for the kibbles required determination of the optimal exit diameter so the food would exit the feeder housing without getting clogged. We know the kinetic and potential energy of the kibbles balances out and the mass flow of food is continuous at the top must be same at the exit at the bottom. The mass flow is the product of the density of kitty food, velocity and cross-sectional area of the pipe.

The velocity of the food comes from the potential and kinetic energy it gathers moving down the storage chamber. Based on the average weight and shape of a kibble it was assumed that a 0.375 in. radius exit provides too small a mass flow at 7 kg/s whereas a 0.75 in. radius provides almost 30 kg/s of kitty food mass flow. This extra mass flow can help account for energy loss before the kibbles reach the bowl.
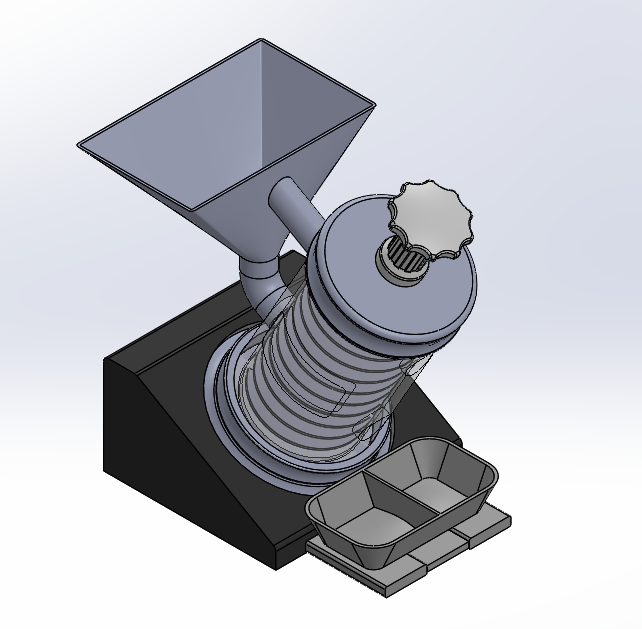
Cat feeder version 2
Figure 6 shows the new design. The new tube inserts in the hole in the center of the new plate, then the tube and plate assembly slide right into the base structure and the exit hole. The food will slide down one tube into a chamber at the bottom that splits into two separate sides, one for each cat. The new design also has a lid with an easy-grip handle added to the gravity feeder to prevent dust from getting into the food chamber.
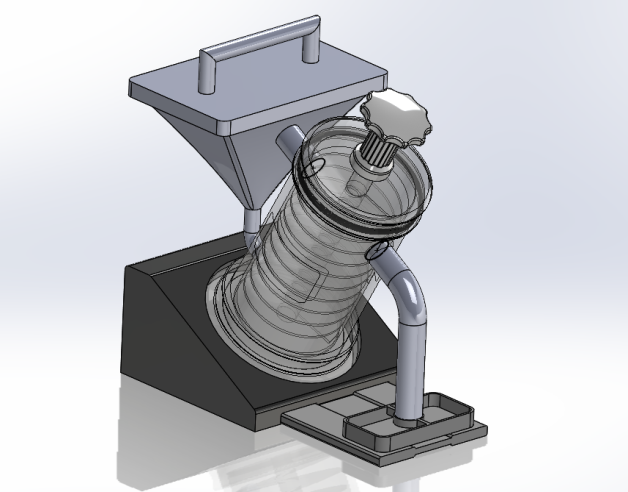
A new hole was drilled into the back with a hole saw to accommodate the new gravity feeder. SOLIDWORKS CAD data was used to measure and verify the positioning of the housing in the angle base and the position of the new hole.
Cat feeder version 3
One major flaw became apparent once the feeder was assembled.
The Archimedes screw is traditionally designed to oppose gravity, thus the idea is to bring food up the chamber from the feed. However, Archimedes screws work verifiably well only with a liquid.

This became apparent as the kibbles sprinkled out of only the top chamber. The energy losses are high trying to oppose gravity once the kibble slides down the gravity feed. A new hole was drilled at the bottom so that the screw regulates the output of food. The version 3 design dispenses the perfect amount of food with little required torque, but it feeds only one cat and the bowl moves when both cats eat from it.
Cat feeder version 4
The SOLIDWORKS model below shows a simple modification to the bowl to allow both cats to be fed simultaneously. The bottom of the bowl is dome shaped to help better distribute the food at the bottom. The new bowl also fits directly into the existing angle base. I learned a great deal about the transfer of energy and how my original idea of using an Archimedes screw to oppose gravity is more cumbersome than using the screw to proportion food moving with gravity, especially since the screw is transferring a solid instead of a liquid.
I regularly use the cat feeder now, and one fill-up of the tank stores enough cat food for 1 to 2 weeks with 2 to 3 turns per serving. The cats often successfully scrap a snack of a few kibbles by clawing at the feeder, but it does a good job regulating so they don’t overeat.
While it functions, the current design is a bit cumbersome. The screw auger could be redesigned as more of a food deflector, the external tank could be larger to hold more food, and the feeder should spill less food outside the bowl. The cats eat the spilled kibbles anyway, but it would be nice to figure out a way to contain the mess.
Future iterations could be automated with a gearbox connected to the screw driven by a motor. A programmable logic controller (PLC) could be hooked up to apply logic and connect to a smartphone app, allowing users to feed cats remotely while away from home.
Two happy kitties = one happy owner!
Jacob Bakovsky is based in Southern California. He is a graduate of Temple University with a B.S. in Mechanical Engineering. He also holds a FE/EIT license. His interests include renewable energy, designing wind and solar energy solutions that could benefit the environment and global energy usage.


I have read so many content about the blogger lovers but this paragraph is truly a pleasant post,
keep it up.